ROBÓTICA WLKATA
Solución Educativa
Para Universidad
solución yo
Células De Entrenamiento Moduladas Para Universidad
Aprendizaje de los fundamentos de la robótica con Arduino, RS485 y PLC
Para investigadores, docentes universitarios y estudiantes que estudian IA y robótica, WLKATA ofrece una serie de minilíneas de producción moduladas. Estas plataformas de capacitación de laboratorio cambian el tedioso estudio de algoritmos y mecanismos en un proceso de aprendizaje interactivo, emocionante y práctico.

| EDUCACIÓN SUPERIOR E INVESTIGACIÓN
Una plataforma de investigación profesional para la educación superior
Basado en las tecnologías de Bus-mastering control PLC, API de código abierto y brazos robóticos de escritorio, WLKATA proporciona una plataforma de investigación robótica ideal para educadores y estudiantes en institutos de educación superior.

-

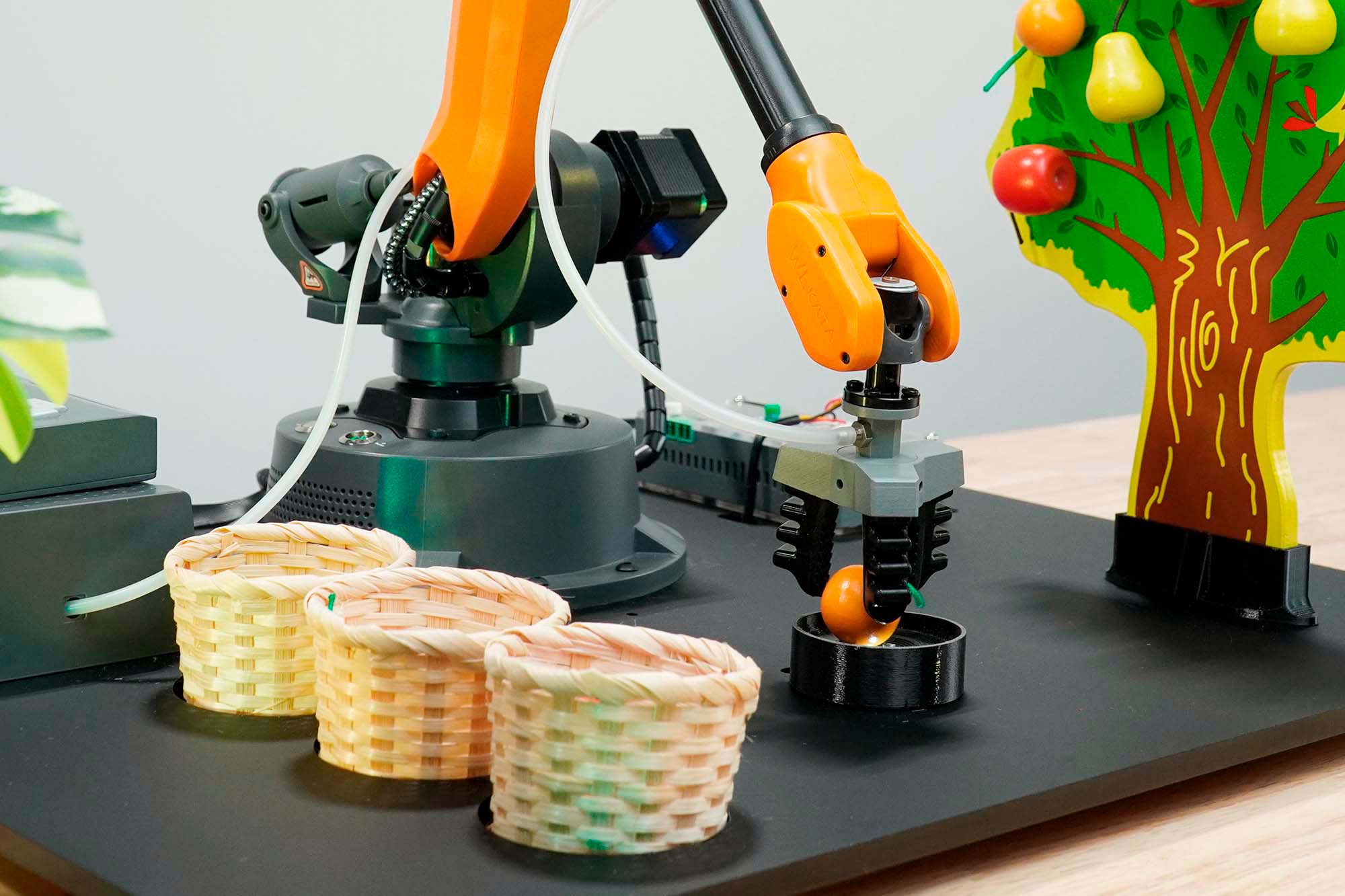
Línea de recolección de frutas
Ver solución → -


Línea de clasificación automática AI |Célula de entrenamiento Mirobot|
Ver solución →




-
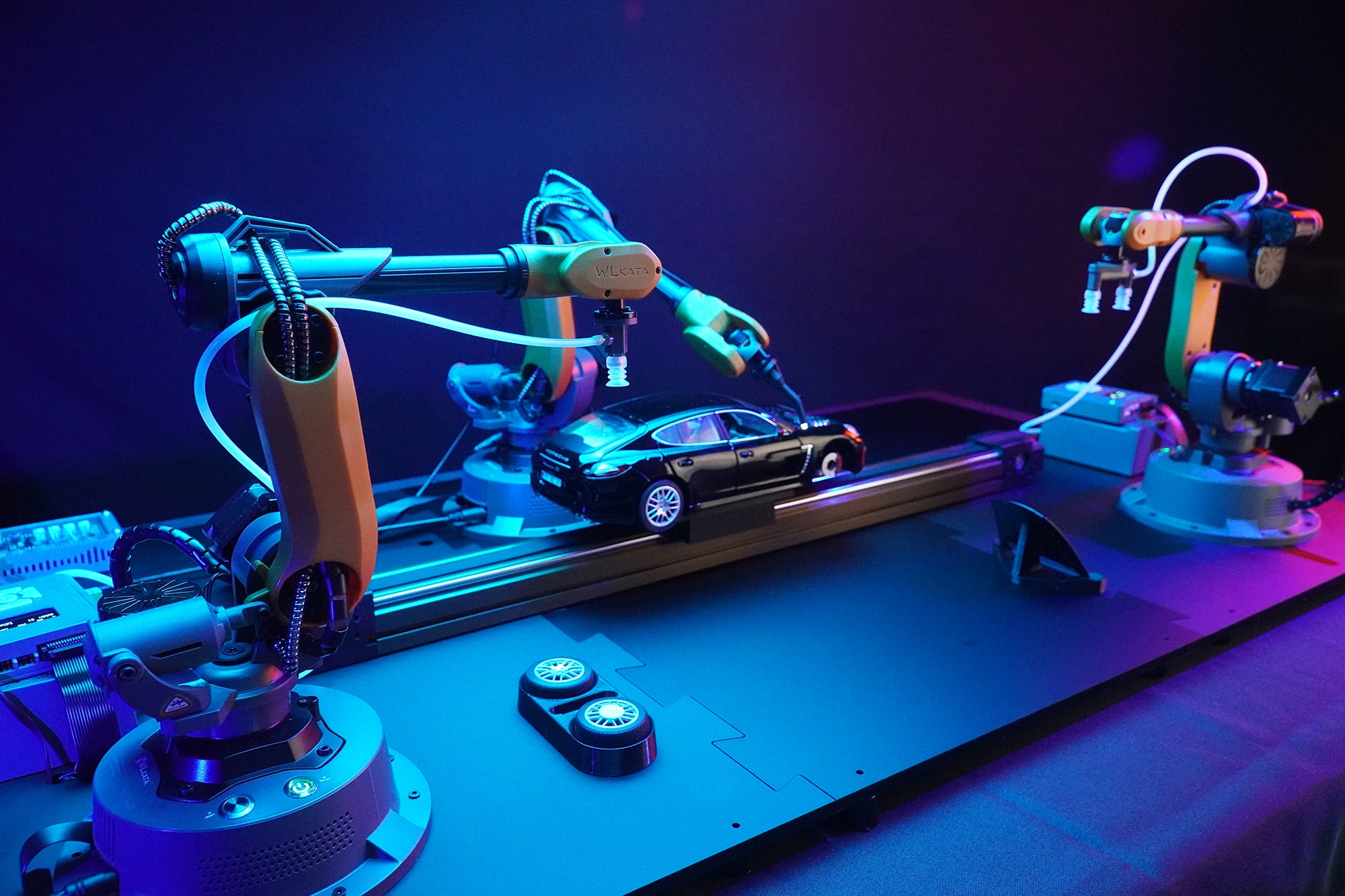
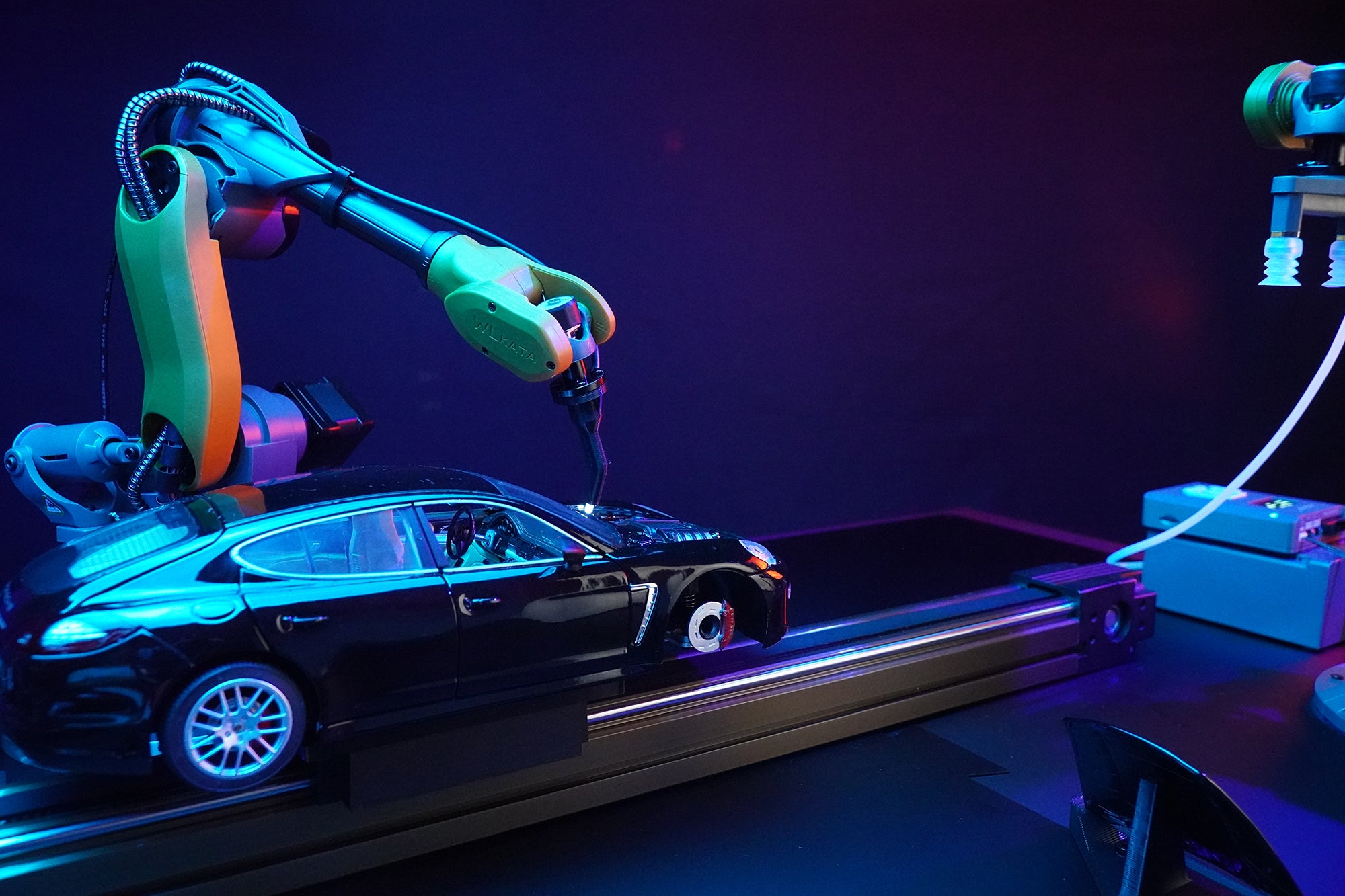
Línea de ensamblaje de automóviles |Célula de entrenamiento Mirobot|
Ver el producto → -

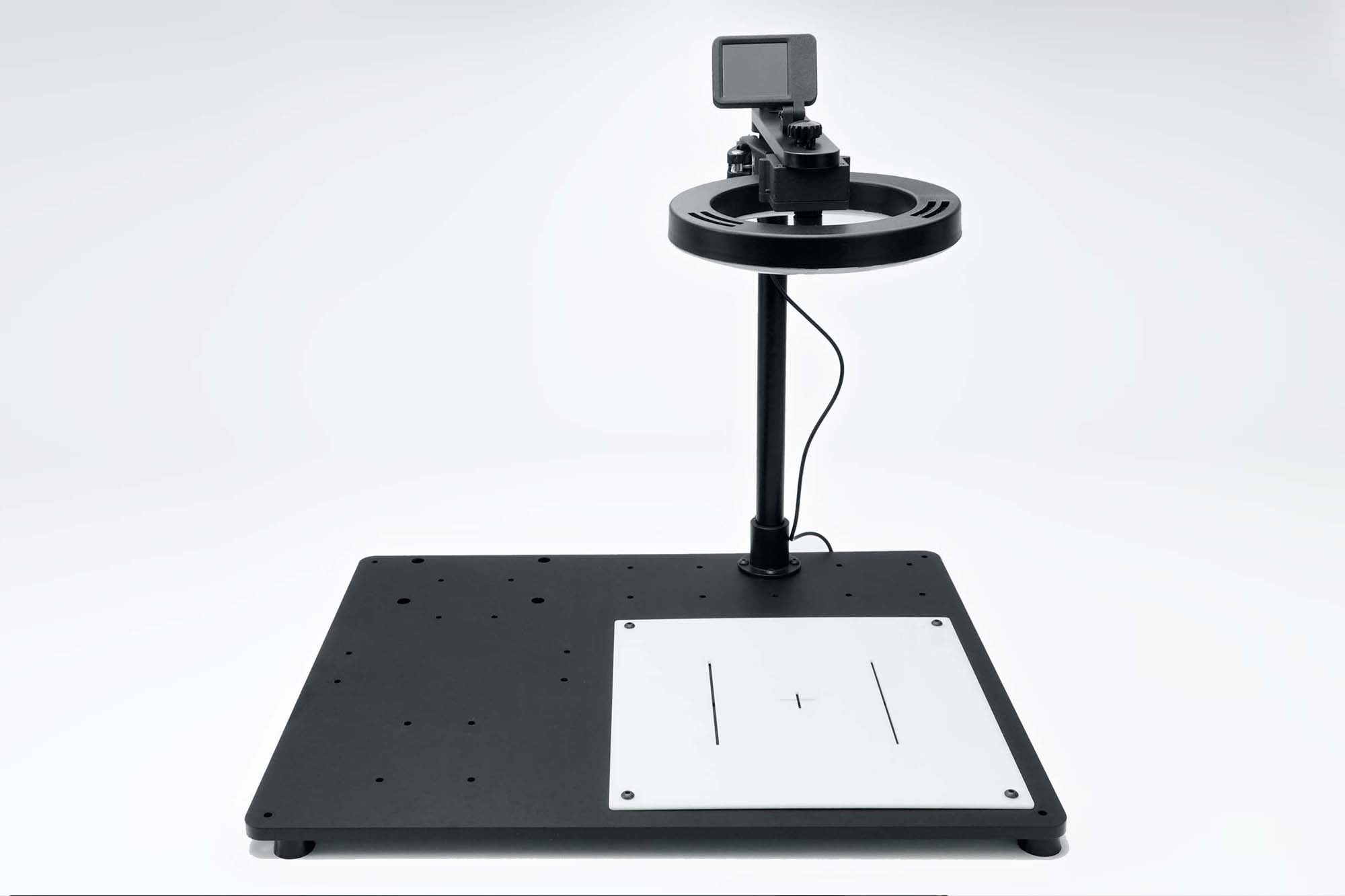
Conjunto de visión Wlkata AI
Ver el producto →





Solución II
Cursos Con Libros De Texto Para La Universidad
Aprendizaje de desarrollo de robótica con cursos ROS, Matlab y VRep con libros de texto
Para los estudiantes e investigadores que trabajan en el desarrollo de robótica y plataformas como ROS, V-rep y Matlab, WLKATA ofrece una serie de currículos basados en brazo robótico, simulación 3D y tutoriales de experimentos paso a paso. Ayuda enormemente a los estudiantes a darse cuenta de la sincronización entre la simulación virtual y el desarrollo de la robótica en el mundo real.
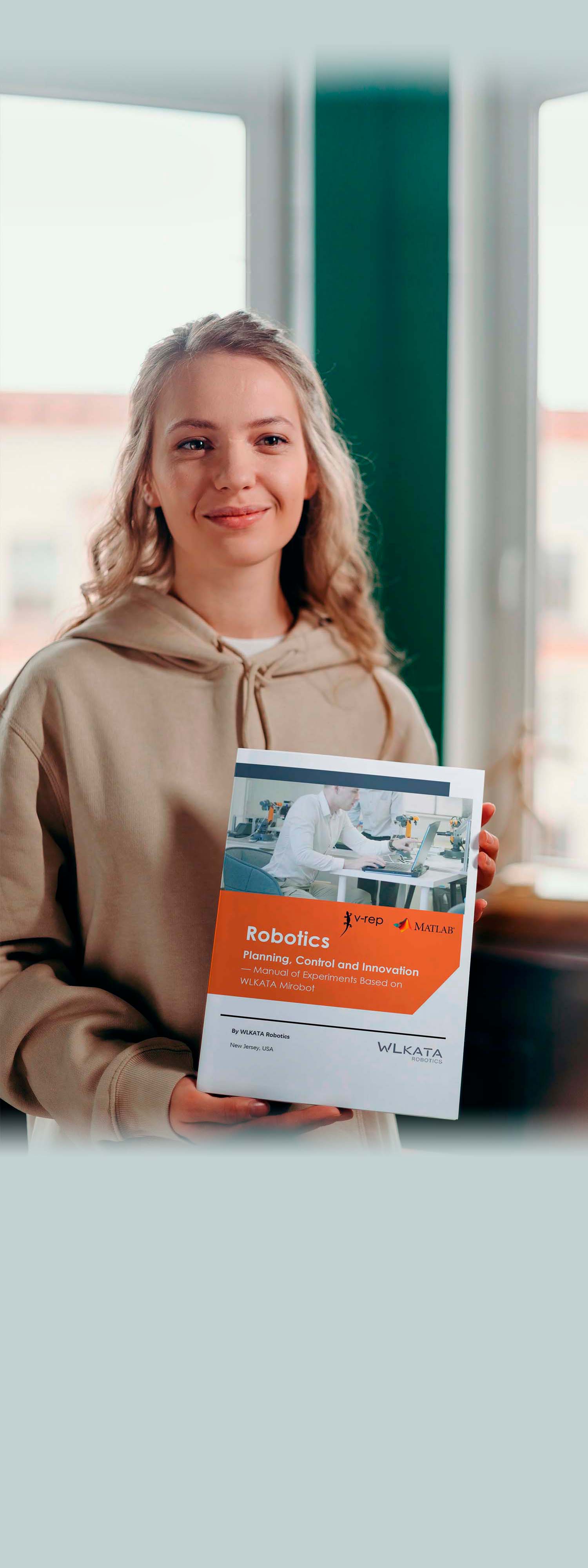
| Libro de texto A |
|| ROBÓTICA Planificación, Control e Innovación ||
— Experimentos basados en WLKATA Mirobot
Autor : WLKATA ROBOTICS
| Nivel de estudio |
| Universidad / Colegio |
(Recomendado para el segundo o tercer año).
| Duración |
25 semanas
| Contenido |
I. Un libro de texto
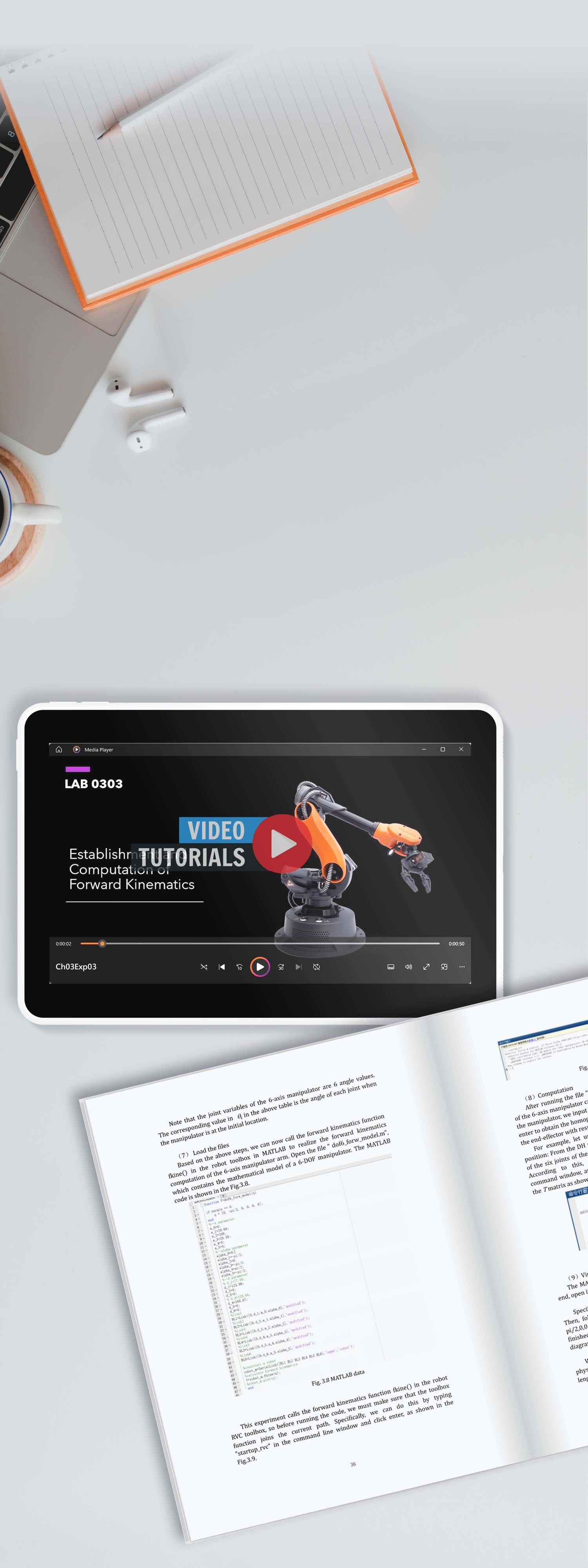
II Más de 10 experimentos de apoyo con videotutoriales
tercero Experimentos código y modelos
| Requisito de software |
Rep. V, Matlab
La mayoría de los experimentos en este curso requieren el V-rep (CoppeliaSim) y/o Matlab
| Objetivo de aprendizaje |
Fullu comprende el principio de los conceptos y procesos típicos de desarrollo de un brazo robótico de 6 ejes, que incluyen:
✔️ Bases matemáticas de los robots
✔️ Análisis cinemático directo de robots
✔️ Cálculo y control de cinemática inversa de robots
✔️ Dinámica y control de robots
Combinado con el brazo robótico Mirobot, este curso enseña los fundamentos del desarrollo de la robótica a nivel universitario.

| Esquema del libro de texto |
Capítulo 1
Introducción
1.1 Conocimientos iniciales sobre Robots Industriales
1.2 Sistema de simulación de robots
Capitulo 2
Transformación
2.1 Transformación en Laboratorio Virtual
2.2 Matriz de transformación en ángulos de Euler
2.3 Demostración de pintura y transformación de marcos en un espacio bidimensional
2.4 Transformación del marco cambiando el marco del efector final
Capítulo 3
Cinemática
3.1 Cinemática directa
3.2 Co-simulación de cinemática directa con MATLAB y V-REP
3.3 Establecimiento y cálculo de la cinemática directa
3.4 Modelado de Cinemática Inversa
3.5 Cálculo de cinemática inversa y cosimulación en MATLAB
3.6 Solución de Cinemática Inversa y Co-simulación
Capítulo 4
Estático
4.1 Marco de Cómputo Estático en Deducción 3D
4.2 Cálculo estático del manipulador
Capítulo 5
Dinámica
5.1 Deducción 3D del cuadro de cálculo dinámico
5.2 Cálculo de la dinámica del manipulador
Capítulo 6
Control de movimiento
6.1 Diseño de la junta impulsora del manipulador
6.2 Motor paso a paso
Capítulo 7
Planificación de movimiento
7.1 Planificación de movimiento para un punto inicial y final dado
7.2 Planificación del movimiento dado el punto inicial, el punto final y el punto intermedio
7.3 Ejemplo de planificación de movimiento del manipulador
7.4 Planificación de movimiento de trayectoria continua
Capítulo 8
Aplicación de algoritmo de control para manipulador de escritorio de 6 ejes
8.1 Experimento de agarre de objetos basado en cinemática inversa
8.2 Pintura de brazo robótico de escritorio mediante planificación de trayectoria de movimiento
8.3 Grabado láser mediante brazo robótico
8.4 Sujetar objetos según el reconocimiento de colores

| Libro de texto B |
|| Robot en desarrollo con ROS ||
— Un manual de experimentos basado en WLKATA Mirobot
Autor : WLKATA ROBOTICS
| Nivel de estudio |
| Universidad / Colegio |
(Recomendado para el segundo o tercer año).
| Duración |
25 semanas
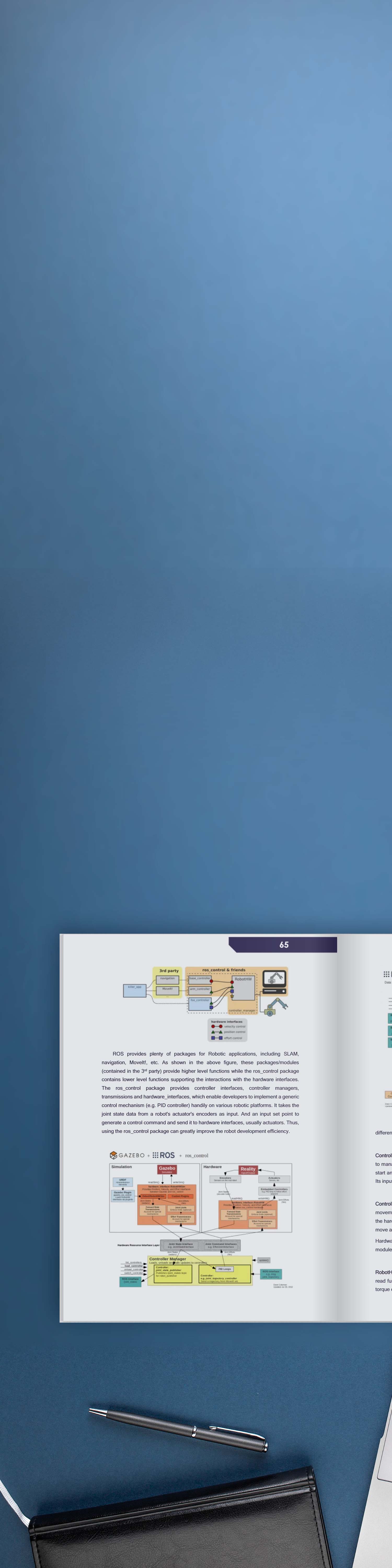
Este libro del curso cubre el marco del software ROS y las funciones básicas de ROS, junto con el proceso de desarrollo del brazo robótico Mirobot en ROS al presentar los casos de función de, por ejemplo, control de movimiento del brazo robótico, voz artificial y visión artificial.
| Objetivo de aprendizaje |
Comprenda completamente el principio del control ROS y el desarrollo de un brazo robótico típico de 6 ejes en ROS, que incluye:
✔️ Modelado de brazo robótico ROS
✔️ Controlando Mirobot con Moveit
✔️ Cálculo y control de cinemática inversa de robots
✔️ Expansión de funciones robóticas


| Esquema del libro de texto |
Capítulo 1
Conociendo a ROS
El origen, los objetivos de diseño y las características de ROS
Capitulo 2
Instalación de ROS
La instalación de Ubuntu y ROS
Capítulo 3
Los fundamentos de ROS
Arquitectura ROS; Crear un paquete de características de ROS; nodo ROS; Aprenda sobre temas de ROS, servicios y parámetros de ROS; Utilice roslaunch; Crear ROS Msg y Srv; Escribir un publicador y suscriptor simple en C++; Ejecutar editores y suscriptores; Escriba un servicio simple y un cliente en C++
Capítulo 4
Modelado de brazo robótico ROS
4.1 Introducción a los modelos URDF
4.2 Exportación de modelos 3D URDF
4.3 Procesamiento de archivos URDF exportados por Mirobot Robotic Arm en Solidworks
Capítulo 5
Controles de brazo robótico Mirobot en ROS
5.1 Protocolos de comunicación de Mirobot
5.2 Implementación de comunicación de ROS y Mirobot
Capítulo 6
Importar Mirobot a Moveit
6.1 Introducción a Moveit
6.2 Configuración Moveit - Asistente de configuración
6.3 Importar el modelo de Mirobot al entorno de simulación de Gazebo
Capítulo 7
Controlar Mirobot con Moveit
7.1 Usar Moveit para controlar el brazo robótico
7.2 Simulación de movimiento usando el modelo de control Moveit (Python)
7.3 Control de movimientos de brazos realmente robóticos con Moveit (C++)
Capítulo 8
Expansión de funciones de Mirobot
8.1 Grabación y reproducción de datos de movimiento del brazo robótico
8.2 Agregar un efector final al modelo
8.3 Agregue una cámara al modelo para obtener información de la imagen
8.4 Agregue Kinect al modelo para obtener información de la nube de puntos
8.5 Agregar un transductor de fuerza al modelo para recopilar datos de simulación
8.6 Agregar reconocimiento de voz para brazos robóticos